
From the orbits of celestial bodies, to cars hurtling around a racetrack, to electrons zipping around the nuclei of atoms, examples of objects in circular motion can be found in a wide variety of scales and speeds. This post is about the generic case: a point particle moving at a constant speed along the circumference of a circle. This is known as uniform circular motion.
Angular Displacement
Consider the case where a particle moves counterclockwise from position a to position b along a circular path whose center is the origin of the xy plane:
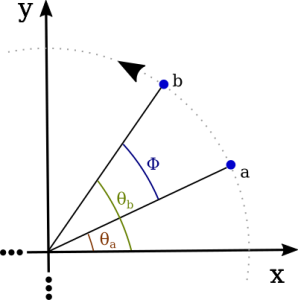
We will define  to be the angle between the radial line segment connecting the particle to the origin and the positive x axis, so at point a we have
to be the angle between the radial line segment connecting the particle to the origin and the positive x axis, so at point a we have  , and at point b we have
, and at point b we have  . The angular displacement, represented as
. The angular displacement, represented as  , is simply the difference between the initial and final values of . For mathematical simplicity, angular displacement is most often expressed as radians.
, is simply the difference between the initial and final values of . For mathematical simplicity, angular displacement is most often expressed as radians.
Since is the angular displacement, we expect that it is a vector. But what direction does it point?
To answer that we turn to the right hand rule. If you hold your right hand perpendicular to the xy plane in such a way that your fingers curl (from base to tip) in the direction from the initial position a to the final position b, then your extended right hand thumb will point in the direction of the angular displacement vector. In the above illustration, the direction of the angular displacement is straight out of the screen.
The distance that the particle has traveled is the length of arc ab. This value can be calculated directly from the definition of the radian.
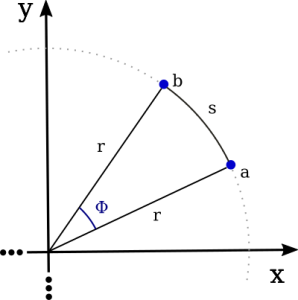
Suppose s is the length of the arc between points a and b, r is the radius of the circular path, and is magnitude of the angular displacement from a to b. If is in radians, then by definition:

All we need to do is rearrange to solve for s:

Angular Velocity
The rate at which the angular displacement changes with respect to time is called the angular velocity and is usually denoted  . The magnitude of this vector, the angular speed, is also sometimes called the angular frequency or radial frequency.
. The magnitude of this vector, the angular speed, is also sometimes called the angular frequency or radial frequency.
The average angular velocity is simply the angular displacement divided by the time interval:

If we want to know the instantaneous angular velocity, we need to turn to calculus and the differential:

The units of angular velocity are most typically radians per second, but are also sometimes revolutions per second or revolutions per minute (rpm).
Like angular displacement, the direction of the angular velocity vector is dictated by the right hand rule. Again, for counter clockwise motion, the angular vector is perpendicular to the xy plane and pointing out of the screen.
Since we are studying uniform circular motion, is constant in both magnitude and direction. Suppose the period, the amount of time it takes for the particle to complete one trip around the circle, is  . Since there are
. Since there are  radians in a circle:
radians in a circle:

Tangential Velocity
Tangential velocity is the velocity of the particle as it travels along its circular path. Unlike angular velocity, the tangential velocity is not constant. Both the magnitude and vector direction of the angular velocity do not change, but while the magnitude of the tangential velocity, the speed, is constant, its direction is constantly changing in order to keep the particle traveling in a circle.
Let’s start by defining the function p(t) to be the particle’s position as a function of time. If we assume that at time t=0, that is also 0, then we only need to use simple trigonometry to calculate the x and y components of the position at any given time t.
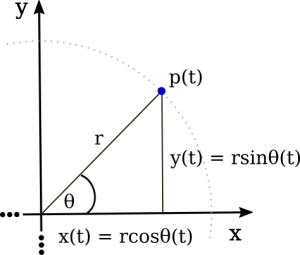
So,


If is the angular velocity, then the value of at time t is:

Substituting  into our position equations:
into our position equations:


Now that we have the components of the particle’s position as functions of time, we can move on to determining the x and y components of the particle’s tangential velocity. Since velocity is the first derivative of position, all we need to do is find the derivatives of our two position equations.
We’ll start with the x component:

We can use the chain rule to find the derivative. As a refresher, the chain rule says:
Given a function h composed of differentiable functions g and f such that  , the derivative of h is:
, the derivative of h is:
![\[h'(x) = g'(f(x)) \cdot f'(x)\]](https://neuraldump.net/wp-content/ql-cache/quicklatex.com-8b25dab57a8dc312d800e31262ec92e0_l3.png "Rendered by QuickLaTeX.com")
If we consider  to be
to be  and
and  to be
to be  , then the derivative of the x component of the displacement vector, aka
, then the derivative of the x component of the displacement vector, aka  , is:
, is:

Using the chain rule to find  yields:
yields:

Graphically, the components and resulting velocity vector look like:
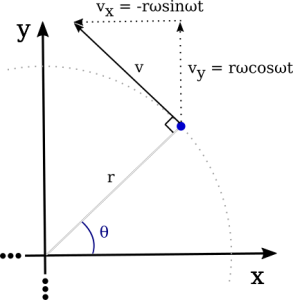
Since the particle’s position at any given time lies along a circular path and velocity is the first derivative of position, the velocity vector ends up being tangent to the path at the particle’s location and pointing in the direction of the particle’s orbit.
Using the Pythagorean Theorem we can calculate the magnitude of the tangential velocity vector, or more simply tangential speed.





We can easily confirm that this is the correct value for the tangential speed. Since the particle is traveling a circular path with radius r, the distance it travels during one orbit is  . If the length of time it takes to complete a singular orbital revolution is T, then the speed is:
. If the length of time it takes to complete a singular orbital revolution is T, then the speed is:

We can define the tangential speed in terms of the angular speed since we know that  :
:

An important point worth noting here is that given a constant angular speed, , the tangential speed is directly proportional to the distance of the particle from the axis of rotation, ie., the radius r of its circular orbit. In other words, if we increase the radius of the orbit while holding the angular speed the same, the tangential speed will increase as well.
Acceleration
While the magnitude of the tangential velocity remains constant in uniform circular motion, the direction of the velocity vector changes continuously in order to keep the particle on a circular path. Changing velocity is better known as acceleration.
Acceleration is the first derivative of the velocity, or the second derivative of the position if you prefer. Again, the x and y components of the velocity vector are:
We again need to use the chain rule to calculate the derivatives. The x and y components of the acceleration vector turn out to be:


Graphically, the components and resulting acceleration vector look like:
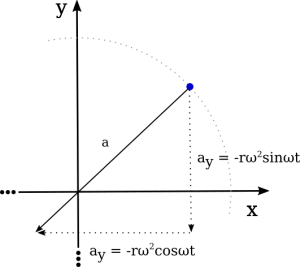
Here we see something interesting. While the velocity vector was tangential to the circular path and pointing in the direction of motion, the acceleration vector points straight back to the axis of rotation. This is known as centripetal acceleration.
To find the magnitude of the acceleration, we again turn to the Pythagorean Theorem.




